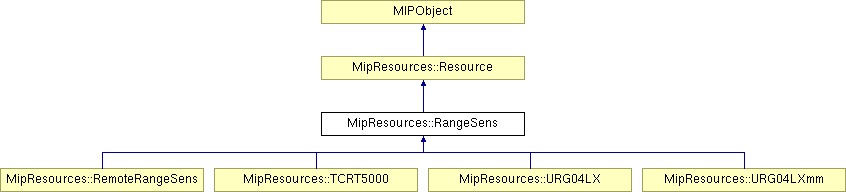
MipResources::RangeSens Class Reference
[Range sensor]
Abstract Range-sensor.
More...
#include <RangeSens.h>
Public Member Functions | |
| virtual ResourcePlate | getPlate () const =0 |
| Get the plate. | |
| RangeSens (int argc, const char *argv[]) | |
| Default constructor. | |
| ~RangeSens () | |
| Destructor. | |
| RangeSensPar * | par () |
| Get parameter pointer. | |
| RangeSensmmPar * | parmm () |
| Get parameter in mm pointer. | |
| bool | getScanType (ScanTypes &type) |
| Get Scan type. A wrapper of the getScanType function of the scan. | |
| bool | updatedScan (Scan &s) |
| Get an updated scan. | |
| void | startScan (unsigned int num) |
| Start a continuous scan. | |
| void | stopScan () |
| Stop a continuous scan. | |
| bool | storedScan (Scan &s, Time timeout) |
| Get the last stored scan, if a continuous scanning is in act the scan is updated. | |
| void | getFixedBearings () |
| Gets the fixed bearings of the RangeSens. | |
Protected Member Functions | |
| virtual Scan | _singleScan ()=0 |
| Get a single Scan. | |
| virtual void | _startScan (unsigned int num)=0 |
| Start a continuous scaninning. | |
| virtual void | _stopScan ()=0 |
| Stop a continuous scaninning. | |
Protected Attributes | |
| RangeSensPar * | _par |
| Parameters. | |
| RangeSensmmPar * | _parmm |
| Parameters in mm. | |
| Scan | _scan |
| Current scan. | |
| bool | on |
| Every inerithed class constructor must set this flag to true. | |
| vector< Angle > * | _fixedBearings |
| If useFixedBearings and scan in meters, this vector contains the bearings. | |
| vector< Anglem > * | _fixedBearingsmm |
| If useFixedBearings and scan in millimeters, this vector contains the bearings. | |
| bool | useFixedBearings |
| Says if use fixed bearings or bearings can change in different scans. | |
| RangeSensOptions | _rangeSensOptions |
| Options for the generic range sensor. | |
Detailed Description
Abstract Range-sensor.
Constructor & Destructor Documentation
| MipResources::RangeSens::RangeSens | ( | int | argc, | |
| const char * | argv[] | |||
| ) |
Default constructor.
Default constructor.
| MipResources::RangeSens::~RangeSens | ( | ) |
Destructor.
Member Function Documentation
| virtual Scan MipResources::RangeSens::_singleScan | ( | ) | [protected, pure virtual] |
Get a single Scan.
Implemented in MipResources::RemoteRangeSens, MipResources::TCRT5000, MipResources::URG04LX, and MipResources::URG04LXmm.
| virtual void MipResources::RangeSens::_startScan | ( | unsigned int | num | ) | [protected, pure virtual] |
Start a continuous scaninning.
- Parameters:
-
num number of scan to perform, (0 means unbounded)
Implemented in MipResources::RemoteRangeSens, MipResources::TCRT5000, MipResources::URG04LX, and MipResources::URG04LXmm.
| virtual void MipResources::RangeSens::_stopScan | ( | ) | [protected, pure virtual] |
Stop a continuous scaninning.
Implemented in MipResources::RemoteRangeSens, MipResources::TCRT5000, MipResources::URG04LX, and MipResources::URG04LXmm.
| virtual ResourcePlate MipResources::RangeSens::getPlate | ( | ) | const [pure virtual] |
Get the plate.
Implements MipResources::Resource.
Implemented in MipResources::RemoteRangeSens, MipResources::TCRT5000, MipResources::URG04LX, and MipResources::URG04LXmm.
| RangeSensPar * MipResources::RangeSens::par | ( | void | ) |
Get parameter pointer.
- Returns:
- Pointer to _par if retrivable and SCAN_SENS, NULL otherwise.
- Note:
- Falls in exception if called not referring to an implemented object.
| RangeSensmmPar * MipResources::RangeSens::parmm | ( | ) |
Get parameter in mm pointer.
- Returns:
- Pointer to _parmm if retrivable and SCAN_SENSMM, NULL otherwise.
- Note:
- Falls in exception if called not referring to an implemented object.
| bool MipResources::RangeSens::getScanType | ( | ScanTypes & | type | ) |
Get Scan type. A wrapper of the getScanType function of the scan.
- Returns:
- true if succesfully got, false otherwise.
- Parameters:
-
[out] &type Returned type.
| bool MipResources::RangeSens::updatedScan | ( | Scan & | s | ) |
Get an updated scan.
- Returns:
- true if the get if all is ok (remeber that scan is a MutExed Resource), false otherwise.
- Parameters:
-
[out] s A scan in which the current scan is copied, if return is true.
Reimplemented in MipResources::URG04LX, and MipResources::URG04LXmm.
| void MipResources::RangeSens::startScan | ( | unsigned int | num | ) |
Start a continuous scan.
- Parameters:
-
[in] num Number of scan to perform, (0 means unbounded).
| void MipResources::RangeSens::stopScan | ( | ) |
Stop a continuous scan.
Get the last stored scan, if a continuous scanning is in act the scan is updated.
- Note:
- Differs from newScan(), it has strictly sense only if startScan was invoked before.
- Returns:
- true if the get if all is ok (remeber that scan is a MutExed Resource), false otherwise.
- Parameters:
-
[out] &s A scan in which the current scan is copied, if return is true. [in] timeout Timeout.
Reimplemented in MipResources::URG04LX.
| void MipResources::RangeSens::getFixedBearings | ( | ) |
Gets the fixed bearings of the RangeSens.
Member Data Documentation
RangeSensPar* MipResources::RangeSens::_par [protected] |
Parameters.
RangeSensmmPar* MipResources::RangeSens::_parmm [protected] |
Parameters in mm.
Scan MipResources::RangeSens::_scan [protected] |
Current scan.
bool MipResources::RangeSens::on [protected] |
Every inerithed class constructor must set this flag to true.
vector<Angle>* MipResources::RangeSens::_fixedBearings [protected] |
If useFixedBearings and scan in meters, this vector contains the bearings.
vector<Anglem>* MipResources::RangeSens::_fixedBearingsmm [protected] |
If useFixedBearings and scan in millimeters, this vector contains the bearings.
bool MipResources::RangeSens::useFixedBearings [protected] |
Says if use fixed bearings or bearings can change in different scans.
Options for the generic range sensor.
The documentation for this class was generated from the following files:
- resources/RangeSens/RangeSens.h
- resources/RangeSens/RangeSens.cpp
