MipResources::WebotsDiffDrive Class Reference
[Motion module]
Represents a Webots differential drive.
More...
#include <WebotsDiffDrive.h>
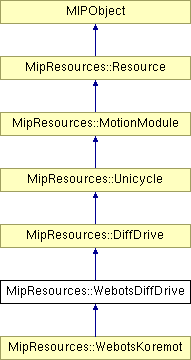
Inheritance diagram for MipResources::WebotsDiffDrive:
Public Member Functions | |
| WebotsDiffDrive (int argc, const char *argv[]) | |
| Default constructor. | |
| ~WebotsDiffDrive () | |
| Destructor. | |
| void | setWheelCommands (Decimal leftAngVel, Decimal rightAngVel) |
| Sets the angular velocities of the left and right wheels. | |
| DiffDriveEncoderReading | getEncoders () |
| Gets the DiffDriveEncoderReading of the encoders of the left and right wheels. | |
| void | resetEncoders () |
| Sets to 0 the encoders of the left and right wheels. | |
| int | simulStep (int) |
| Performs a simulation step. | |
| void | _startSimu (unsigned int num) |
| Starts the simulation. | |
| void | _stopSimu () |
| Stops the simulation. | |
| void | initWebotsDiffDrive () |
Protected Attributes | |
| WebotsDiffDrivePar * | _weboPar |
| WebotsDiffDriveVar * | _weboVar |
| WebotsKoremotPar * | _weKmPar |
| Thread | _simuStepThread |
| Manages the simulation steps. | |
| pthread_mutex_t | _simuStepMutex |
Detailed Description
Represents a Webots differential drive.
Constructor & Destructor Documentation
| MipResources::WebotsDiffDrive::WebotsDiffDrive | ( | int | argc, | |
| const char * | argv[] | |||
| ) |
Default constructor.
- Parameters:
-
argc Argc. argv Argv.
| MipResources::WebotsDiffDrive::~WebotsDiffDrive | ( | ) |
Destructor.
Member Function Documentation
| void MipResources::WebotsDiffDrive::setWheelCommands | ( | Decimal | leftAngVel, | |
| Decimal | rightAngVel | |||
| ) | [virtual] |
Sets the angular velocities of the left and right wheels.
- Parameters:
-
leftAngVel Angular velocity to drive the left wheel. rightAngVel Angular velocity to drive the right wheel.
Implements MipResources::DiffDrive.
| DiffDriveEncoderReading MipResources::WebotsDiffDrive::getEncoders | ( | ) | [virtual] |
Gets the DiffDriveEncoderReading of the encoders of the left and right wheels.
- Returns:
- DiffDriveEncoderReading.
Implements MipResources::DiffDrive.
| void MipResources::WebotsDiffDrive::resetEncoders | ( | ) |
Sets to 0 the encoders of the left and right wheels.
| int MipResources::WebotsDiffDrive::simulStep | ( | int | stepTime | ) |
Performs a simulation step.
| void MipResources::WebotsDiffDrive::_startSimu | ( | unsigned int | num | ) | [inline] |
Starts the simulation.
- Parameters:
-
num number of scan to perform, (0 means unbounded)
| void MipResources::WebotsDiffDrive::_stopSimu | ( | ) | [inline] |
Stops the simulation.
| void MipResources::WebotsDiffDrive::initWebotsDiffDrive | ( | ) |
Member Data Documentation
Parameters, implemented class.
Variables, implemented class.
WebotsKoremotPar* MipResources::WebotsDiffDrive::_weKmPar [protected] |
Thread MipResources::WebotsDiffDrive::_simuStepThread [protected] |
Manages the simulation steps.
pthread_mutex_t MipResources::WebotsDiffDrive::_simuStepMutex [protected] |
The documentation for this class was generated from the following files:
- resources/MotionModule/WebotsDiffDrive.h
- resources/MotionModule/WebotsDiffDrive.cpp
