MipBaselib::MotionModuleState Class Reference
State of an unycicle. More...
#include <MotionModuleState.h>
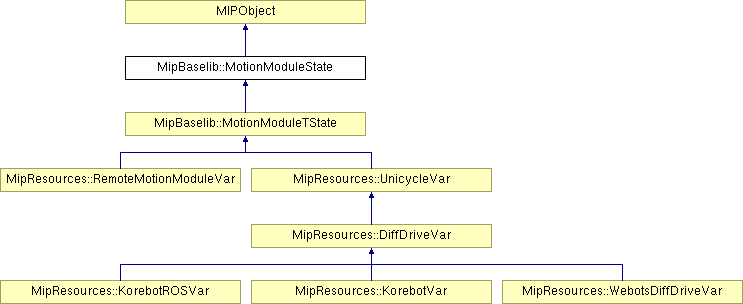
Inheritance diagram for MipBaselib::MotionModuleState:
Public Member Functions | |
| MotionModuleState (Pose p=Pose(), Decimal lv=0.0, Decimal av=0.0) | |
| Default constructor. | |
| MotionModuleState (const MotionModuleState &v) | |
| Copy constructor. | |
| MotionModuleState & | operator= (const MotionModuleState &v) |
| Assigment operator =. | |
| MotionModuleState & | operator+= (const MotionModuleState &a) |
| operator += | |
| MotionModuleState & | operator-= (const MotionModuleState &a) |
| operator -= | |
| const MotionModuleState | operator+ (const MotionModuleState &other) const |
| operator + | |
| const MotionModuleState | operator- (const MotionModuleState &other) const |
| operator - | |
| string | getObjectName () const |
| Gets name. | |
| Position | velVector (void) |
| Current velocity vector of the Unicycle. | |
| virtual string | print () |
| Prints variables. | |
Public Attributes | |
| Pose | pose |
| Current pose of the Unicycle, e.g., estimated Pose respect to the initial pose (dead reckoning). | |
| Decimal | linVel |
| Current linear velocity of the Unicycle. | |
| Decimal | angVel |
| Current angular velocity of the Unicycle. | |
Detailed Description
State of an unycicle.
Constructor & Destructor Documentation
Default constructor.
- Parameters:
-
p Current pose of the Unicycle. lv Current linear velocity of the Unicycle. av Current angular velocity of the Unicycle.
| MotionModuleState::MotionModuleState | ( | const MotionModuleState & | v | ) |
Copy constructor.
Member Function Documentation
| MotionModuleState & MotionModuleState::operator= | ( | const MotionModuleState & | v | ) |
Assigment operator =.
| MotionModuleState & MotionModuleState::operator+= | ( | const MotionModuleState & | a | ) |
operator +=
| MotionModuleState & MotionModuleState::operator-= | ( | const MotionModuleState & | a | ) |
operator -=
| const MotionModuleState MipBaselib::MotionModuleState::operator+ | ( | const MotionModuleState & | other | ) | const [inline] |
operator +
| const MotionModuleState MipBaselib::MotionModuleState::operator- | ( | const MotionModuleState & | other | ) | const [inline] |
operator -
| string MipBaselib::MotionModuleState::getObjectName | ( | ) | const [inline, virtual] |
| Position MotionModuleState::velVector | ( | void | ) |
Current velocity vector of the Unicycle.
| string MotionModuleState::print | ( | ) | [virtual] |
Member Data Documentation
Current pose of the Unicycle, e.g., estimated Pose respect to the initial pose (dead reckoning).
Current linear velocity of the Unicycle.
Current angular velocity of the Unicycle.
The documentation for this class was generated from the following files:
- baselib/Unicycle/MotionModuleState.h
- baselib/Unicycle/MotionModuleState.cpp
