Sunflower Dataset
Crop/weed segmentation dataset for sunflower (Helianthus annuus) crops

Selective weeding is one of the key challenges in the field of agriculture robotics. To accomplish this task, a farm robot should be able to accurately detect plants and to distinguish them between crop and weeds. Most of the promising state-of-the-art approaches make use of appearance-based models trained on large annotated datasets. Unfortunately, creating large agricultural datasets with pixel-level annotations is an extremely time consuming task, actually penalizing the usage of data-driven techniques. To this end, we used a custom-built agricultural field robot to record three datasets on a sunflower farm in Jesi, (Italy), at the Assam facility over a period of one month in spring 2016.
We recorded data starting from the emergence phase of the crop plants until the end of the useful period for using chemical treatments. We recorded the dataset by using a 4-channel multi-spectral camera. The complete dataset list, ordered according to the acquisition date:
Images in the datasets are arranged according to the following folder list:
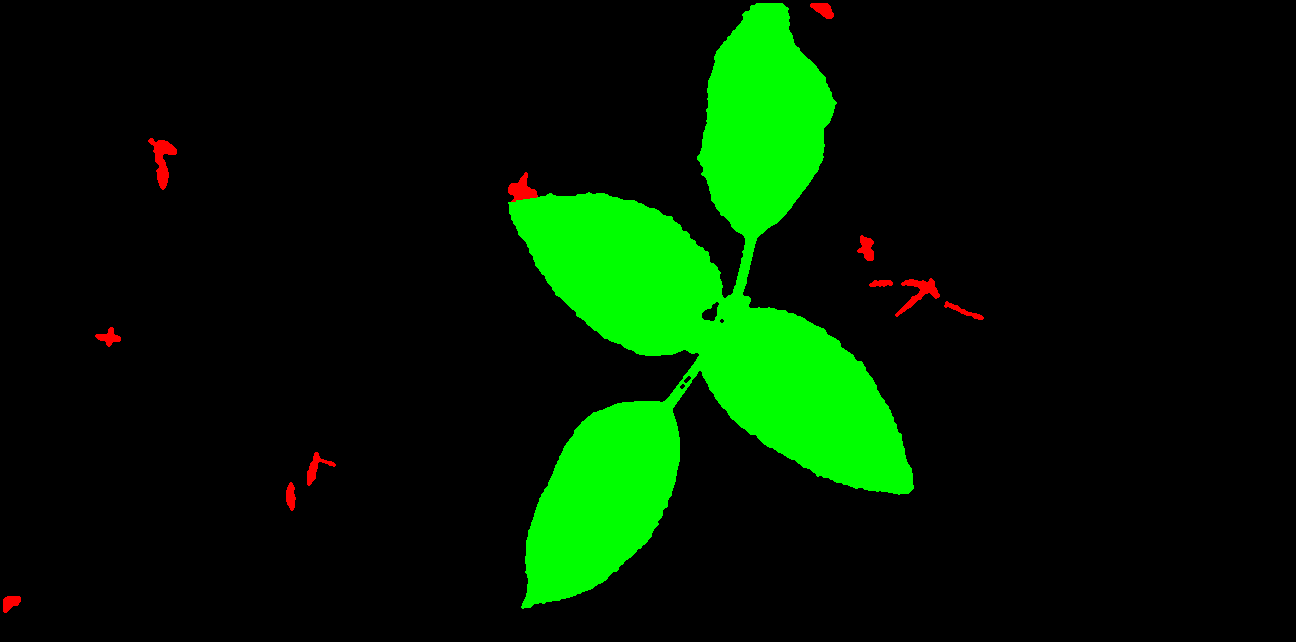
rgb: folder containing RGB images. nir: folder containing near infrared, single channel images. gt: folder containing grayscale, single channel pixelwise annotations. (0 soil; 1 Crop; 2 weed) gt_color: folder containing RGB, 3 channels pixelwise annotations. (black soil; green crop; red weeds)

