Flourish Sapienza Datasets
A Collection of Datasets for Agriculture Robotics acquired by the Sapienza Flourish Team

Collecting effective datasets is an essential requirement for agriculture robotics in order to test the several perception algorithms involved in this domain. This acquisition task is rather challenging since different issues have to be taken into account: (i) a cultivated filed should be available (ii) each dataset strongely depends on the growth stage of the crop (iii) farming robots are usually equipped with several heterogeneous sensors that should be managed properly (iv) dataset ground truths are usually difficult to acquire and/or extremely time consuming to create. In this website we make available some datasets collected or created by researchers of Sapienza - University of Rome, within the context of the Flourish Project funded by the European Community's Horizon 2020. The main goal of such a project is to bring modern technologies and robotics platforms into the Precision Agriculture domain developing smart and effective robotic solution for precision farming, more information about Flourish can be found in the project website
Datasets

Software
In addition to the datasets, we provide some software packages we developed within the Flourish project:
- TSS: a tool developed to manage sensory data gathered by the farming robots [source code]
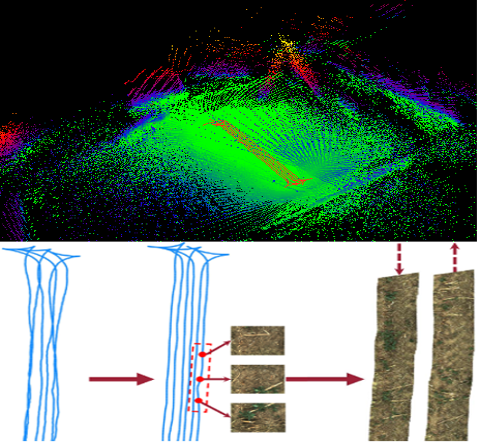
- MCAPS: Multi-Cue Agricultural Positioning System, a multi-sensor, pose-graph based framework developed for accurate localization within the field [source code]
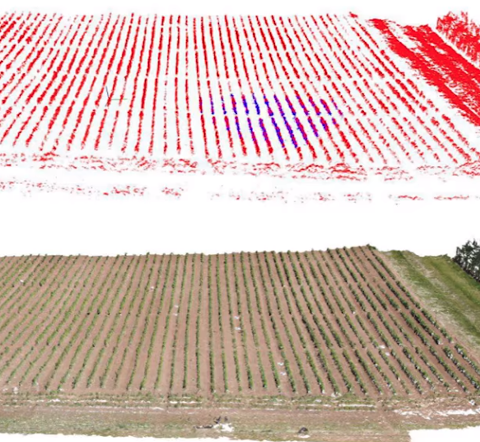
- AgriColMap: a tool developed to register 3D maps gatherd by aerial and ground farming robots [source code]
Publications
A list of publications from Sapienza, University of Rome related to the Flourish project:
- Ciro Potena, Raghav Khanna, Juan Nieto, Roland Siegwart, Daniele Nardi, and Alberto Pretto, "AgriColMap: Aerial-Ground Collaborative 3D Mapping for Precision Farming", in arXiv:1810.00457, 2018 (pdf, source code, video, bibtex)
- Marco Imperoli*, Ciro Potena*, Daniele Nardi, Giorgio Grisetti, Alberto Pretto, "An Effective Multi-Cue Positioning System for Agricultural Robotics", In IEEE Robotics and Automation Letters, Vol: 3, Issue: 4, October 2018, pages 3685-3692 (pdf, source code, video, bibtex)
- M. Di Cicco, C. Potena, G. Grisetti, and A.Pretto, "Automatic Model Based Dataset Generation for Fast and Accurate Crop and Weeds Detection", In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, 2017. (pdf, video, bibtex)
- C. Potena, D. Nardi, and A. Pretto, "Fast and Accurate Crop and Weed Detection with Summarized Train Sets for Precision Agriculture”, In International Conference on Intelligent Autonomous Systems (IAS), Shangai, 2016, Best Student Paper Award Finalist. (pdf, bibtex)
 All datasets on this page are copyright by us and published under the
All datasets on this page are copyright by us and published under the 