SPQR Team NAO image dataset
Authors: Dario Albani, Ali Youssef, Vincenzo Suriani, Daniele Nardi, and Domenico D. Bloisi
The SPQR Team NAO image data set contains a set of annotated images captured by different players (i.e., NAO robots) and with varying environmental conditions. The images come from tests made in environments subject to natural and artificial illumination at the same time, thus different areas of the scene may be subject to high contrast and differences in brightness.
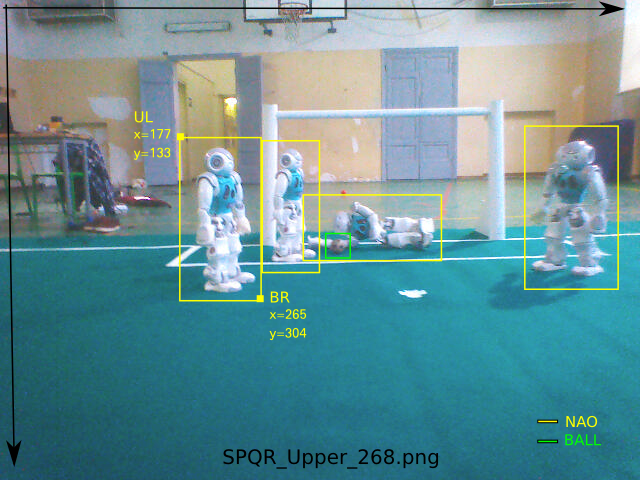
The images are processed accordingly to a pre-sampling phase, where images that are temporally adjacent are discarded. Annotated images present three different labels, namely ball, nao, and goal. All the annotations are provided in a text file named annotations.txt that contains one annotation per line. Annotations entries are divided into ImageName, UpperRightCorner, BottomLeftCorner, Class. ImageName is the full image name, including the extension. The Class information is set accordingly to the three previous listed classes. The remaining two parameters are the positions of the upper-left and bottom-right corners of the bounding box that wraps the corresponding object. Both are expressed in pixels and have the origin been placed in the upper-left corner of the original image. Since more than one object is usually present in an image, bounding boxes could overlap.
More details about the SPQR Team NAO image data set can be found in the following paper:
D. Albani, A. Youssef, V. Suriani, D. Nardi, and D.D. Bloisi, "A Deep Learning Approach for Object Recognition with NAO Soccer Robots", in RoboCup 2016: Robot World Cup XX draft
The authors wish to tank the Multi-Sensor Interactive Group at the University of Bremen, which provided part of the images in the data set.
The following figure shows an example of the annotations available.
The SPQR dataset can be dowloaded via the following links:
Original images (1.3 GB)
Cropped images (958 MB)
Images with ball - Annotated (1000 MB)
Non verbal dataset (134 MB)
Realistic Ball Detection
Training data
- Positive samples from top camera
- Negative samples from top camera
- Positive samples from bottom camera
- Negative samples from bottom camera
Classifiers (OpenCV xml format)