Speaky for Robots
NEWS - S4R Corpus Collection!!!
We arranged a web-based system to acquire large-scale lexical corpus for domestic robotics. In order to participate to the Speaky for Robots Corpus Collection please click here!
Hardware and Software Requirments: a mic and a browser (every browser BUT Internet Explorer is supported).
Project Description
SPEAKY for Robots (S4R) aims at fostering the definition and deployment of voice user interfaces (VUIs) in robotic applications where human-robot interaction is required. More in depth, S4R promotes speech technologies transfer towards manufacturing processes, to provide semi-automatic speech-based interface development for robotic platforms. This in turn will boost up the robot presence in manifold activities, by supporting a natural interaction with humans.
S4R specific goal is a novel Robotic Voice Development Kit (RVDK), namely a framework that supports robotic developers in designing voice user interfaces with little effort. RVDK is conceived as an interactive environment aiding designers to define the voice interface according to the desired application requirements; hence, it is adaptable to different application fields. In order to design and implement the RVDK, state of the art solutions about lexical vocabularies and knowledge representation to capture the semantics of the domain, and natural language processing technologies will be integrated to build the input for the speech processing system SPEAKY, that is currently commercialized by a partner in the consortium.
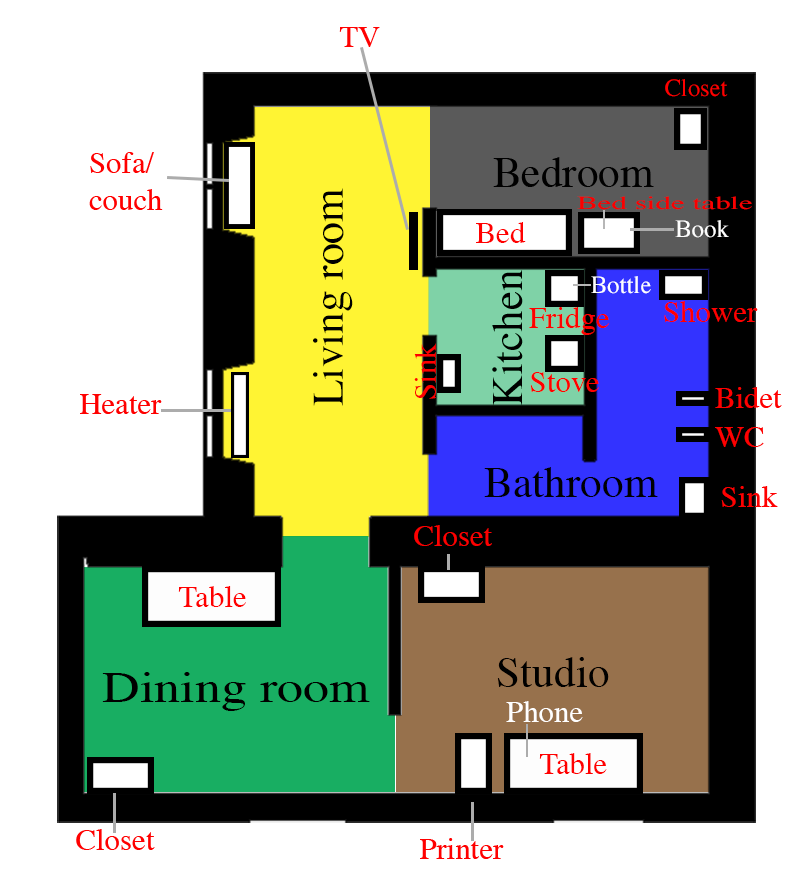
S4R experiment targets two possible application domains for RVDK. The first scenario deals with home services, where a user controls a humanoid robot through a voice user interface within a domestic environment. The second scenario consists of an outdoor robotic surveillance, where the user is controlling the action of a wheeled robot capable of navigating in rough terrain. The goal of the experiments is to assess the performance of the voice interface implemented though RVDK. This project is thus a joint enabling technology development effort, whose scope falls within the human-robot co-worker scenario, addressing the human-robot interfacing and safety research focus.
Dissemination and Deliverables
Usability Study
Map of the real domestic environment.
List of the available commands to control the robot.
Download the organizer form.
{kind=link}