DIAG Robotics Lab -
Thesis topics
Many
theoretical and/or experimental activities are available at
the
DIAG Robotics Lab as master theses. Typically, they are
related to
on-going
research activities, especially in the context of european
and italian
projects in which we are involved. Occasionally, we propose
theses to
be
done at companies, or at universities and research centers
around the
world. Self-proposed thesis arguments are also welcome.
Each
thesis at the DIAG Robotics Lab is supervised by one of the
faculty
members. To apply for a thesis, contact the contact person
in advance. It is better to sign up when you have yet 3 or 4
exams to
take. It is also desirable to have at least one control or
robotics
course in your curriculum.
A tentatively
up-to-date list of theses is given below. Consider however
that this is
just a selection of the available topics; for further
information check
our research
webpages.
Mixed reality for drone swarms
(added February 2023;
contact: Oriolo)
 The
project aims at building a Mixed Reality environment for a swarm
of Crazyflies, small drones developed for indoor experimentation (https://www.bitcraze.io/products/crazyflie-2-1).
First of all, a virtual environment is built (e.g., around an
existing simulator) and a digital twin of the drones is created.
Exploiting the global position information, it is possible to link
real drones to the virtual environment and create any sort of
virtual sensor (e.g., gas plume detection, cameras and so forth).
The sensor readings corresponding to the robot position are then
communicated to the drones through the radio channel, so that the
drones can take the necessary control decisions. Eventually, tests
with up to 20 real Crazyflies will be conducted.
The
project aims at building a Mixed Reality environment for a swarm
of Crazyflies, small drones developed for indoor experimentation (https://www.bitcraze.io/products/crazyflie-2-1).
First of all, a virtual environment is built (e.g., around an
existing simulator) and a digital twin of the drones is created.
Exploiting the global position information, it is possible to link
real drones to the virtual environment and create any sort of
virtual sensor (e.g., gas plume detection, cameras and so forth).
The sensor readings corresponding to the robot position are then
communicated to the drones through the radio channel, so that the
drones can take the necessary control decisions. Eventually, tests
with up to 20 real Crazyflies will be conducted.
As a possible extension, the mixed reality system can be connected
with an existing mixed reality environment for kilobot robots,
creating the conditions for research in heterogeneous robot
swarms. The project is conducted at the Institute of Cognitive
Sciences and Technologies of the National Research Council in Rome
(https://www.istc.cnr.it)
under the supervision of Dr. Vito Trianni. Good programming skills
(C++, Python) are required.
Professional camera support
(added July 2022;
contact: De Luca)
 Cartoni is
an international leader in designing, manufacturing, and
marketing professional camera supports for motion picture and
television industries.
Cartoni is
an international leader in designing, manufacturing, and
marketing professional camera supports for motion picture and
television industries.
Based in Roma (Via di Portonaccio) since 1935, the company has
an history of mechanical innovation that ensured its success
(and multiple awards). Cartoni owns and uses in its products 33
different patents on fluid action counterbalance systems and
tripods. More recently, it started a research line on automation
of the camera usage with its multi-dof systems of support (see
the video). Possible topics of interest for a
master thesis in Control Engineering or in Artificial
Intelligence and Robotics include (in order of temporal
immediacy):
- Optimal tuning of PID laws and general improvement of the
remote control system of the single driving axes (up to 5)
supporting the camera motion.
- Position vs. velocity control schemes, with associated
programming, acquisition and accurate repetion of desired
sequences of camera motions.
- Study and design of an integrated control system that
coordinates the motion of the individual axes, driven by image
features extracted and tracked in the camera frame (visual
servoing).
- Feasibility analysis of a system that tracks in real time the
pose (position and orientation) of the camera, based on infrared
sensing (or similar technology) and passive targets in the
environnment and on the mobile subject (indoor and outdoor).
Real-time estimation of human-body
pose with IMU wearable sensors
(added May 2021; contact:
De Luca)
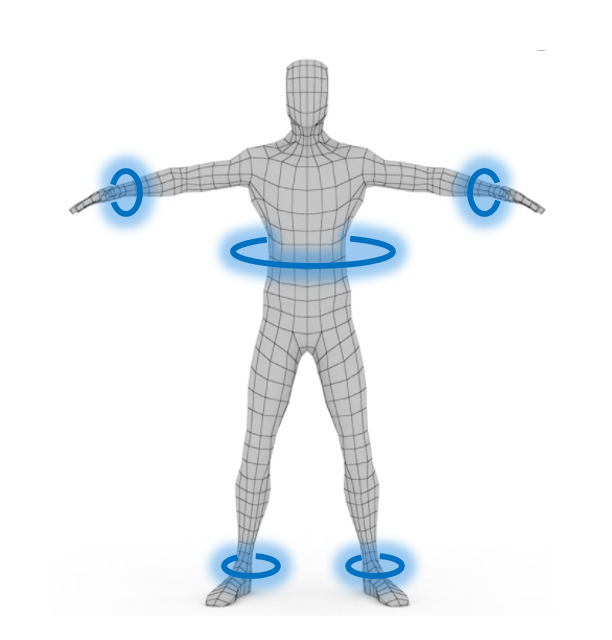 The objective of this master
thesis is to investigate the use of wearable sensors in order to
identify in real time the pose of the human body during a
workout. The study aims at testing the technology of IMU
sensors, both in static and dynamic conditions. The main
technical topics concern:
The objective of this master
thesis is to investigate the use of wearable sensors in order to
identify in real time the pose of the human body during a
workout. The study aims at testing the technology of IMU
sensors, both in static and dynamic conditions. The main
technical topics concern:
- calibration process for the body baseline setting;
- body movements estimation from the output of five wearable IMU
sensors.
The thesis will be conducted in the Lab, with sensors provided
by a partner in North Italy.
Task control of a robot manipulator mounted on a satellite (added Dec 2019; contact: De Luca)
 This project will take place at
the Thales Alenia Space Italia
(TASI) site in Roma. The work is based on previous results on
the
analysis of the dynamic couplings between a floating satellite
and a
robot arm mounted on it, on the disturbances produced by the
robot
motion on the satellite attitude, and on the design of control
laws
minimizing these effects. The new objective is the design, study
and
implementation of control laws for the composite system by
considering:
i) more complex
operational tasks; ii)
cases in which the robot manipulator is connected to a second
satellite
(with the associated kinematic and dynamic constraints); iii) a
new view on the singularity of system configurations as a
function of
changes in the satellite attitude (actuation constraints).
This project will take place at
the Thales Alenia Space Italia
(TASI) site in Roma. The work is based on previous results on
the
analysis of the dynamic couplings between a floating satellite
and a
robot arm mounted on it, on the disturbances produced by the
robot
motion on the satellite attitude, and on the design of control
laws
minimizing these effects. The new objective is the design, study
and
implementation of control laws for the composite system by
considering:
i) more complex
operational tasks; ii)
cases in which the robot manipulator is connected to a second
satellite
(with the associated kinematic and dynamic constraints); iii) a
new view on the singularity of system configurations as a
function of
changes in the satellite attitude (actuation constraints).
The ideal candidate should be enrolled in Master studies in
Robotics or
Control Engineering and have a solid background in robotics, in
particular on dynamics and control, a good command of
Simulink/Matlab
and/or of other simulation packages, and programming skills in
C/C++.
Attitude
disturbance rejection for a 2-dof mechanical system (added Dec 2019; contact: De Luca)
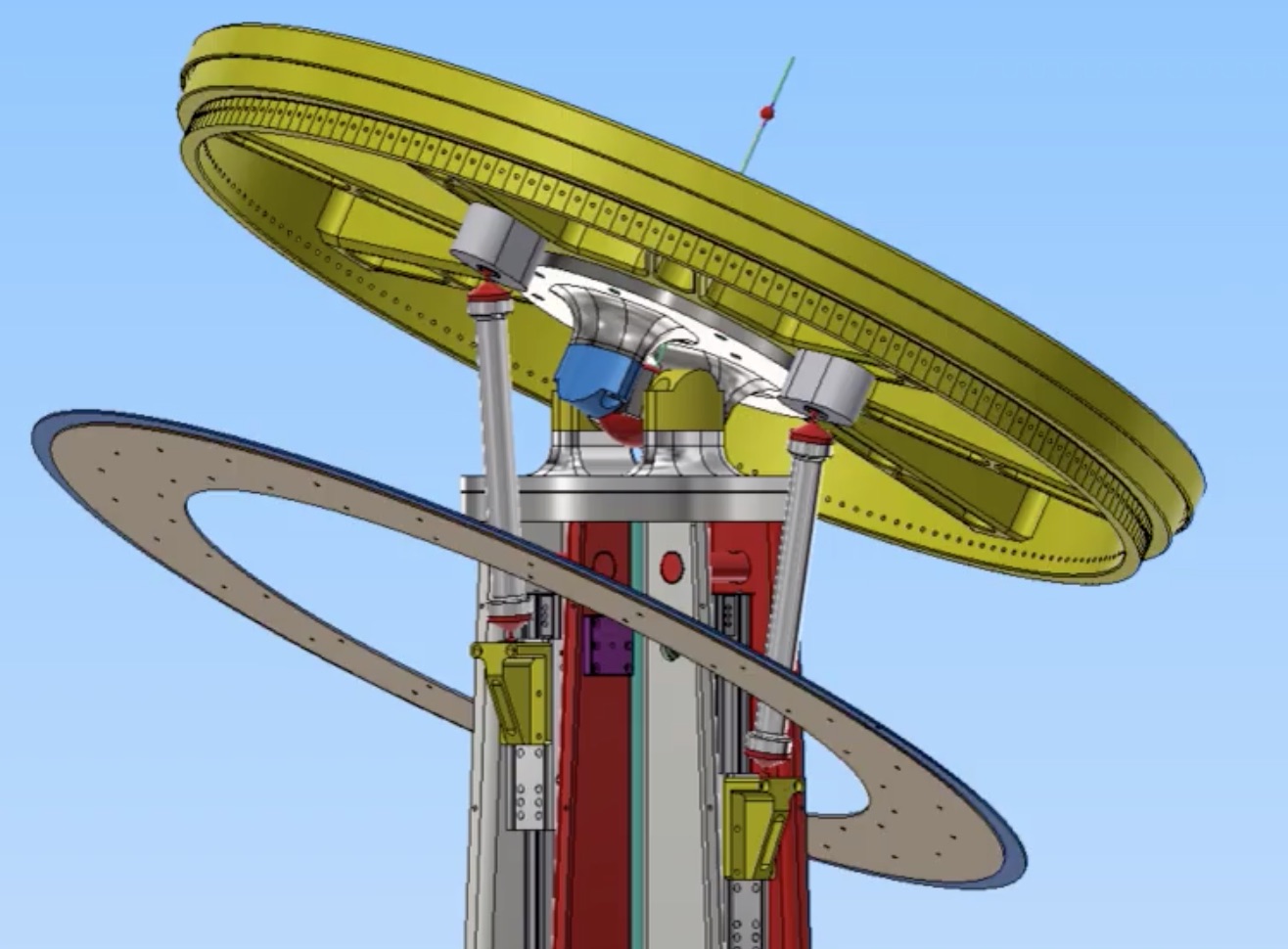 This project takes place at the Seastema
site in Roma. Seastema, a company of the Fincantieri
group, is a global supplier of integrated marine
automation technologies. The work
consists in designing, simulating, and implementing a control scheme within a real-time
sensing/actuation architecture for a mechanical platform
carrying
a radar, so as to compensate through quick and accurate pitch
and roll
motions any disturbance acting on the attitude of the radar
system.
This project takes place at the Seastema
site in Roma. Seastema, a company of the Fincantieri
group, is a global supplier of integrated marine
automation technologies. The work
consists in designing, simulating, and implementing a control scheme within a real-time
sensing/actuation architecture for a mechanical platform
carrying
a radar, so as to compensate through quick and accurate pitch
and roll
motions any disturbance acting on the attitude of the radar
system.
The ideal candidate should be enrolled in the Master in Control
Engineering, have a solid background in kinematics, dynamics and
control
aspects, a good command of Simulink/Matlab or of other
simulation
packages, and real-time programming skills.
Topics
on humanoids and human-centered mechatronics (added Nov 2019; contact: Oriolo
or De Luca)
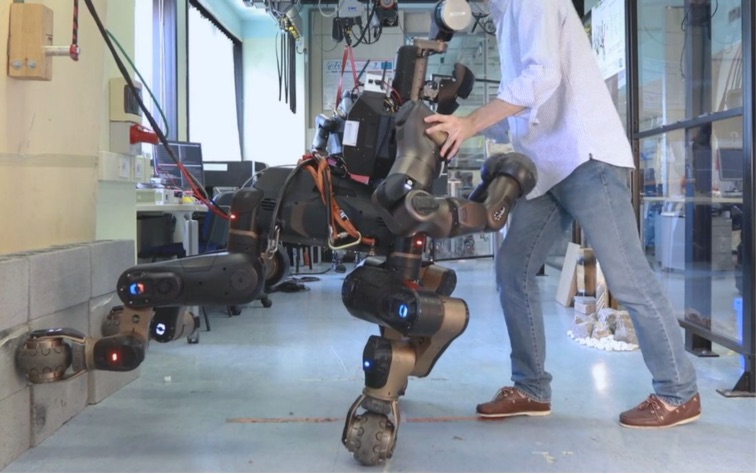 A number of topics for master
theses is available in the Humanoids & Human Centered Mechatronics
(HHCM) group of the Istituto Italiano di Tecnologia
(IIT) in Genova, under the supervision of Dr. Nikos Tsakaragis
and Dr.
Enrico Mingo. Typically, internships are for about 6 months and
living
expenses can be partly covered. The topics deal with motion
planning
and balancing or locomotion control of biped and quadruped
robots in
manipulation tasks and interacting with the environment. The
experimental validation will be based on the CENTAURO and COMAN+
robots. More details are available in this document.
A number of topics for master
theses is available in the Humanoids & Human Centered Mechatronics
(HHCM) group of the Istituto Italiano di Tecnologia
(IIT) in Genova, under the supervision of Dr. Nikos Tsakaragis
and Dr.
Enrico Mingo. Typically, internships are for about 6 months and
living
expenses can be partly covered. The topics deal with motion
planning
and balancing or locomotion control of biped and quadruped
robots in
manipulation tasks and interacting with the environment. The
experimental validation will be based on the CENTAURO and COMAN+
robots. More details are available in this document.
Ideal candidates should be enrolled in Master studies in
Robotics or
Control Engineering, must have solid background in robotics, in
particular about dynamic and control aspects, and programming
skills in
C/C++.
Sensor-based
supervision of robotic manufacturing tasks (added Nov 2019; contact: De Luca)
 Selected topics for a master
thesis are available occasionally in the Konica Minolta
Laboratory Europe located in Roma, under the local supervision
of
Francesco Puja and his team. One such topic deals with a Gazebo
simulated environment for robotics manufacturing and focuses on
learning methods for robot grasping, as described in detail in
this document.
Another topic explores the use of depth sensing information to
guarantee safe coexistence of a human sharing the workspace with
a
Universal Robots UR3.
Selected topics for a master
thesis are available occasionally in the Konica Minolta
Laboratory Europe located in Roma, under the local supervision
of
Francesco Puja and his team. One such topic deals with a Gazebo
simulated environment for robotics manufacturing and focuses on
learning methods for robot grasping, as described in detail in
this document.
Another topic explores the use of depth sensing information to
guarantee safe coexistence of a human sharing the workspace with
a
Universal Robots UR3.
Ideal candidates should be enrolled in Master studies in
Robotics or
Control Engineering, must have a solid background in robotics,
in
particular on human-robot interaction and visual-based control,
good
command of dynamic simulation packages and programming skills in
C/C++.
Human-robot
interaction and sensor-based programming (added Oct 2019; contact: De Luca)
 A number of projects for master
thesis is available at the Robotics and Motion Division of ABB Italia
in Sesto S. Giovanni (Milano), under the local supervision of
Beatrice
Procoli. The current topics deal with robot programming by
camera
integration or by voice commands, object recognition with the
ABB Yumi
robot, or avoiding collisions during robot task execution with a
camera
sensor. More details are available in this document.
A number of projects for master
thesis is available at the Robotics and Motion Division of ABB Italia
in Sesto S. Giovanni (Milano), under the local supervision of
Beatrice
Procoli. The current topics deal with robot programming by
camera
integration or by voice commands, object recognition with the
ABB Yumi
robot, or avoiding collisions during robot task execution with a
camera
sensor. More details are available in this document.
Ideal candidates should be enrolled in Master studies in
Robotics or
Control Engineering, must have a solid background in robotics,
in
particular on physical/cognitive human-robot interaction and
sensor-based control, and programming skills in C/C++.
DIAG Robotics Lab