Goal-based navigation
- Date:
- 2009-12 This work consist in goal based navigation with potential field method for a non-holonomic robot. It is possible to employ two kinds of repulsive field: Classic or Vortex.
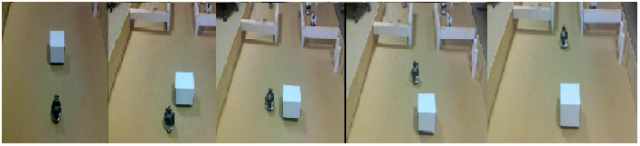
The robot KheperaIII during the navigation.
Goal-based navigation on Player
For test obsAvoiAlgoLIP on player$ ./testObsAvoiAlgoLIP -options
$ ./testObsAvoiAlgoLIP -obsAvoiAlgoLIPVortexField true
Goal-based navigation on KheperaIII
The algorithm run in remote mode. Then execute on KheperaIII's shell:
$ ssh root@192.168.0.10<id> $ cd ../2ndFlash $ ./RemKhepSrv
And execute on pc shell
$ ./testObsAvoiAlgoLIP -options
$ ./testObsAvoiAlgoLIP -obsAvoiAlgoLIPVortexField true
