We have developed a control-based approach for visual navigation of
humanoid robots in office-like environments. In particular, the
objective of the humanoid is to follow a maze of corridors, walking as
close as possible to their center to maximize motion safety. Our
control algorithm is inspired to a vision-based technique originally
designed for unicycle robots and extended in [1] to
cope with the
presence of turns and junctions. In [2] we prove that the corridor
following control law provides asymptotic convergence of robot heading
and position to the corridor bisector even when the corridor walls are
not parallel. A state transition system allows navigation in networks
of corridors connected through curves and T-junctions.
The extension to turns, junctions and
non-parallel corridor walls has been preliminarly
validated through Webots simulations on a unicycle robot. For image
processing we have used the OpenCV library. In particular, we used
Canny's algorithm for edge detection, probabilistic Hough transform for
line segments extraction and a mergine procedure to fuse similar
segments and ultimately identify corridor guidelines in the image. The
following clip shows
the results of our corridor navigation strategy.
An experimental validation of the proposed visual navigation method has been carried out on the humanoid robot NAO, which has a camera on its forehead. Images used to detect corridor guidelines are extracted from a video stream with a 10 Hz frame rate and a resolution of 320x240. The forward velocity of NAO is constant, while its angular velocity is provided by the proposed visual control law.
Corridor navigation
Parallel corridor guidelines

The first two snapshots show the
robot starting off the corridor center but rapidly recovering it. The
last two snapshots illustrate how NAO is able to keep walking at the
center of the corridor.
Non-parallel corridor guidelines
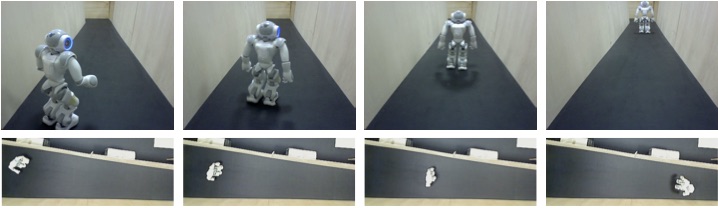
The first two snapshots show the
robot starting off the corridor center but rapidly recovering it. The
last two snapshots illustrate how NAO is able to keep walking along the
corridor bisector.
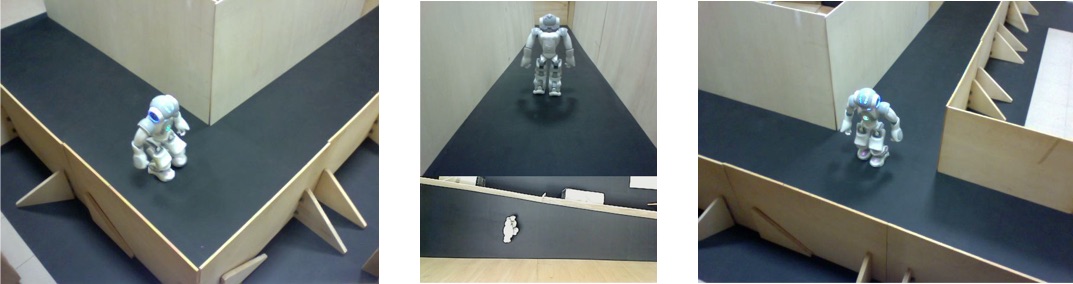
Negotiating a turn

In the first snapshot NAO is approaching a left turn. The subsequent snapshots show how the robot correctly detects the corner and keeps the center of the corridor also during the turn.
Turning at a T-junction

The first snapshot shows NAO approaching the junction. When the junction is detected the robot takes the specified direction (second and third snapshot) and resumes walking at the center of the corridor (fourth snapshot).
Video clip
Unicycle simulation and experiments with NAO are shown integrally in the video below.
[1] A. Faragasso, G. Oriolo, A. Paolillo, and M. Vendittelli, Vision-Based Corridor Navigation for Humanoid Robots, 2013 IEEE Int. Conf. on Robotics and Automation (ICRA 2013), Karlsruhe, Germany, May 2013 (pdf).
[2] A. Paolillo, A. Faragasso, G.
Oriolo, M.
Vendittelli, "Vision-based
maze navigation for humanoid robots," to appear in Autonomous
Robots. DOI:
10.1007/s10514-015-9498-0