
Last update: December 20, 2011
This page reports on the first experimental results obtained (in October 2006) from the integration of the activities of three CyberWalk partners: TUM, ETH, and ourselves (UOR). We tested our control laws on the small-scale ball array platform developed by TUM. A car-like robot carrying a picture of human head and shoulders represents the walking user. The position and orientation of the car are extracted from the images acquired by a fixed overlooking camera. The design and implementation of the visual tracking algorithm have been performed by ETH. |
||
|
 |
|
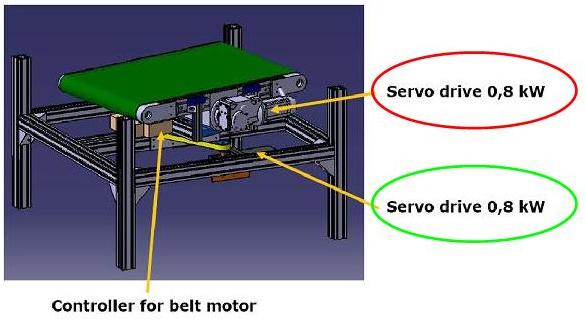
A sketch of the mechanics of the CyberCarpet. |
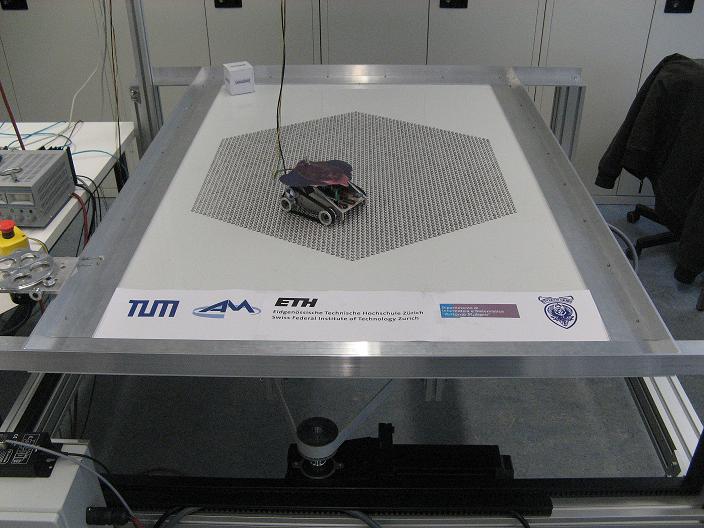
A picture of the small-scale prototype. |
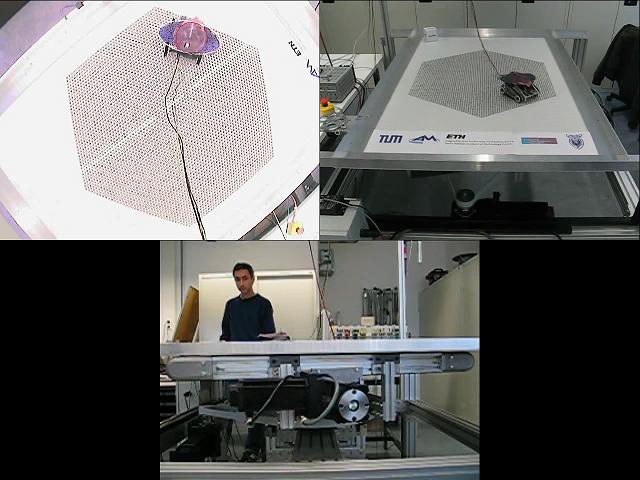
An example of the tracking system. |
The overall architecture (platform actuation + visual tracking + control laws) was tested on several relevant scenarios.
|
 |
| Martin (TUM) | Michael (ETH) | Paolo (UOR) |
 |
 |
 |