The Multi-SRT method is a cooperative exploration strategy for a team of mobile robots. The method proceeds from the parallelization of the single-robot SRT technique and is based on the randomized incremental generation of a collection of data structures called Sensor-based Random Trees (SRT), each representing a roadmap of an explored area with an associated safe region. Decentralized cooperation and coordination mechanisms are used to improve the exploration efficiency and to avoid conflicts.
Documents
The Multi-SRT cooperative exploration method has been designed and developed by: A. Franchi, L. Freda, G. Oriolo, M. Vendittelli.
More details are given in this paper presented at IEEE ICRA'07.
Realized within the Move3D (a powerful motion planning software environment realized at LAAS-CNRS) under the assumption of perfect (although limited-range) sensing and localization, these simulation clips highlight the performance of the Multi-SRT method for cooperative robot exploration.
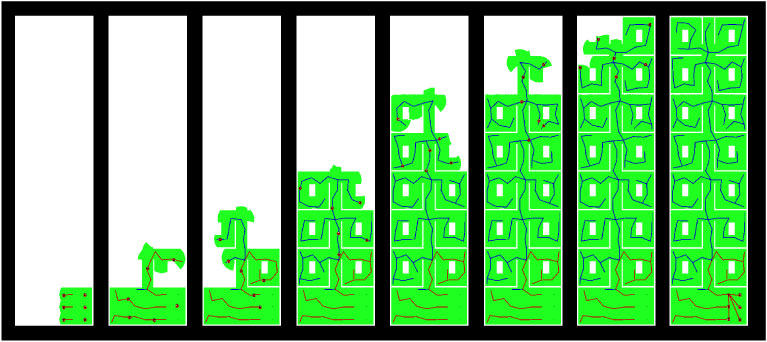
Simulation 1: scattered start (AVI clip, zipped). The robots are initially scattered in the environment (as if they had been parachuted).
Simulation 2: clustered start (AVI clip, zipped). The exploration is started with the robots grouped in a cluster (more realistic for environments with a single main entrance).
Note how the robots assume different colors during the exploration: